

摘要:足式机器人是一种模拟生物运动模式的机器人,具有独特的优点和缺点。其优点包括强大的地形适应性、灵活性和高效能量利用率;缺点则包括复杂的控制算法、机械结构的稳定性和精度挑战以及高制造成本。通过深入探讨足式机器人的优缺点,可以更好地理解其在不同应用场景下的适用性,并为其未来发展提供有益的参考。
本文目录导读:
随着科技的飞速发展,足式机器人在日常生活、工业生产、军事领域等方面的应用逐渐普及,足式机器人凭借其独特的移动方式和灵活性,展现出巨大的发展潜力,如同任何技术一样,足式机器人也有其优点和缺点,本文将详细探讨足式机器人的优缺点,以期为读者提供全面的了解。
足式机器人的优点
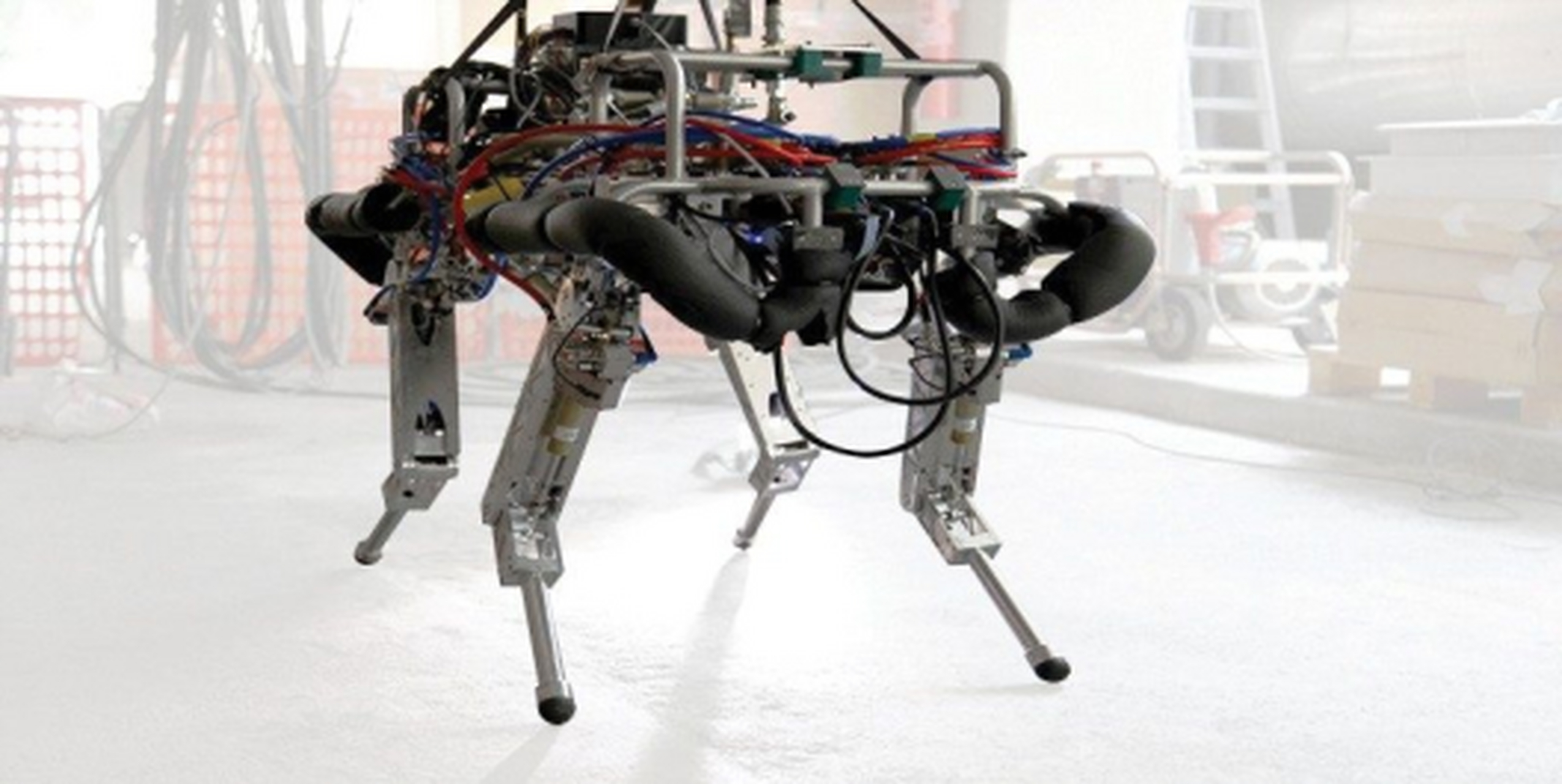
1、灵活性高:足式机器人的移动方式使其具有极高的灵活性,可以在复杂环境中工作,与传统的轮式或履带式机器人相比,足式机器人能更好地适应不平整的地形,甚至可以在崎岖的山地、楼梯等环境中自如行动。
2、动力学性能强:足式机器人在运动过程中,可以通过调整步态和姿势来应对各种复杂情况,具有较强的动力学性能,这使得足式机器人在执行任务时,能够应对突发状况,具有一定的应变能力。
3、适用范围广:由于足式机器人具有较高的灵活性和适应性,因此在许多领域都有广泛的应用,在救援现场,足式机器人可以协助救援人员搜索伤员、运送物资;在工业生产线上,足式机器人可以完成搬运、检测等任务;在军事领域,足式机器人可以执行侦查、巡逻等任务。
足式机器人的缺点
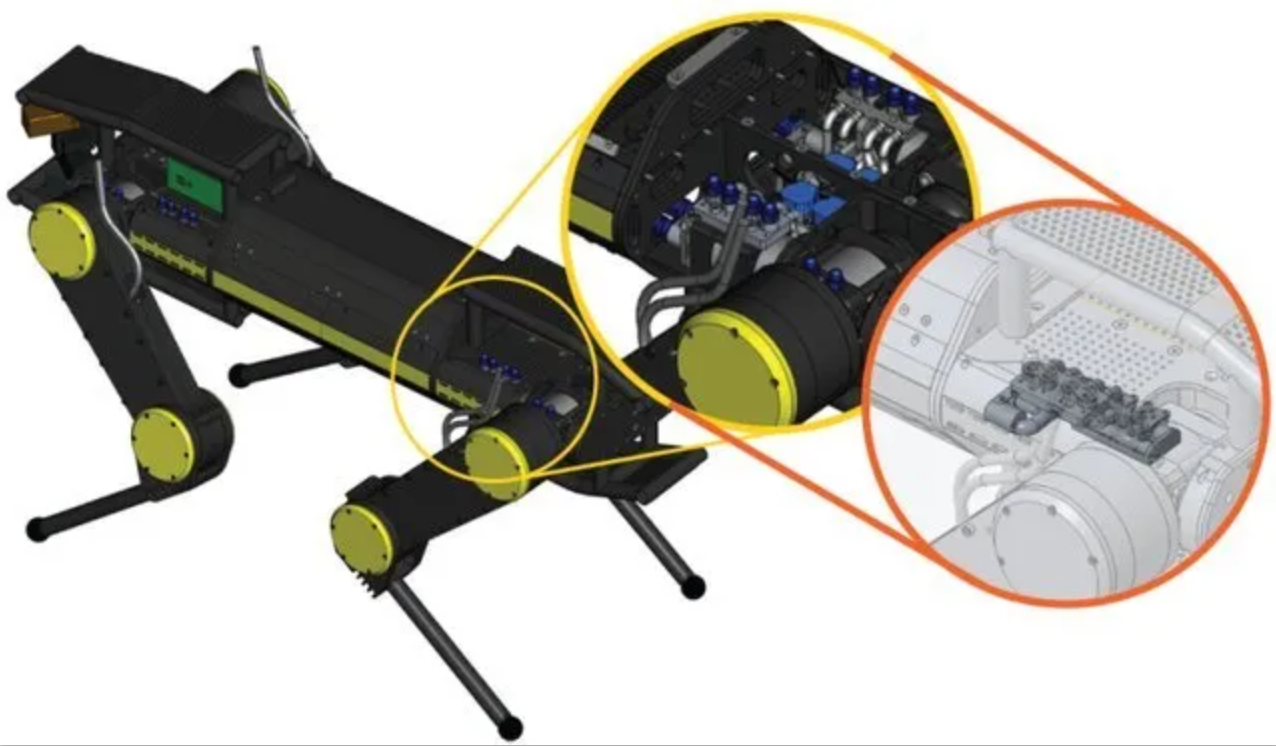
1、研发成本高:足式机器人的研发需要投入大量的资金和资源,其复杂的机械结构、精密的控制系统以及高性能的传感器等都需要高昂的研发和制造成本,为了满足复杂环境下的工作需求,足式机器人还需要进行大量的实验和测试,这也增加了研发成本。
2、能量消耗大:由于足式机器人在运动过程中需要消耗大量的能量,因此其续航能力成为一个重要的问题,虽然目前已有一些技术如能量回收、优化算法等被应用于减少能量消耗,足式机器人的能量消耗仍然是一个需要解决的问题。
3、控制难度大:足式机器人的控制是一个复杂的过程,需要解决许多问题如稳定性、协调性等,为了实现精确的移动和操控,足式机器人需要先进的控制系统和算法,这增加了研发难度,也对操作人员提出了更高的要求。
足式机器人具有灵活性高、动力学性能强、适用范围广等优点,在多个领域都有广泛的应用前景,其研发成本高、能量消耗大、控制难度大等缺点也限制了其进一步发展,我们需要继续投入更多的研究和资金,以克服这些缺点,推动足式机器人的进一步发展。
随着科技的进步,我们期待足式机器人在移动性能、能源效率、成本控制等方面取得更大的突破,我们也需要关注其在社会、伦理等方面的影响,确保其应用符合社会价值观和法律法规,足式机器人具有巨大的发展潜力,值得我们期待。
展望
足式机器人将在更多领域得到应用,如航空航天、深海探索、医疗服务等,随着技术的不断进步,足式机器人的性能将得到提升,成本将降低,使得更多的领域能够受益于这一技术,我们也需要关注足式机器人在人工智能、自主决策等方面的研究,以提高其智能化水平,更好地适应复杂环境和工作任务。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号