

摘要:四足步行机器人的结构设计涉及机器人的行走、稳定性和运动性能。该设计包括机器人腿部关节的结构、材料选择和布局,以及驱动系统的配置。结构设计需考虑机器人运动时的动力学特性和环境因素,以实现高效、稳定、灵活的行走。通过优化结构设计,四足步行机器人能够在不同地形和环境下完成复杂任务。
本文目录导读:
随着科技的飞速发展,四足步行机器人作为一种模拟生物运动的新型机器人,其研究与应用领域日益广泛,在自动化、人工智能、智能制造等领域,四足步行机器人凭借其强大的适应性和灵活性,在复杂环境中展现出巨大的潜力,本文将详细介绍四足步行机器人的结构设计,包括其主要组成部分、设计原则及优化策略等。
四足步行机器人的主要组成部分
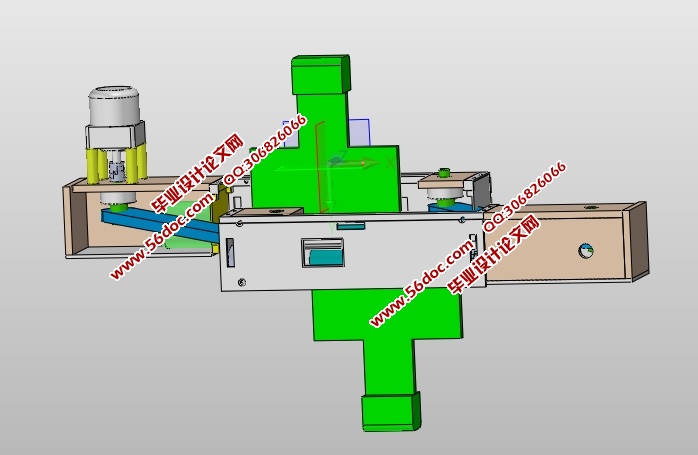
四足步行机器人的结构设计涉及多个关键组成部分,主要包括机身结构、腿部结构、关节结构以及驱动与控制系统等。
1、机身结构
机身结构是四足步行机器人的主体框架,为机器人提供稳定的基础,设计时需考虑机身的刚度、强度和重量等因素,以确保机器人在运动过程中的稳定性,机身结构还需考虑如何合理布置各种功能模块,如电池、控制器、传感器等。
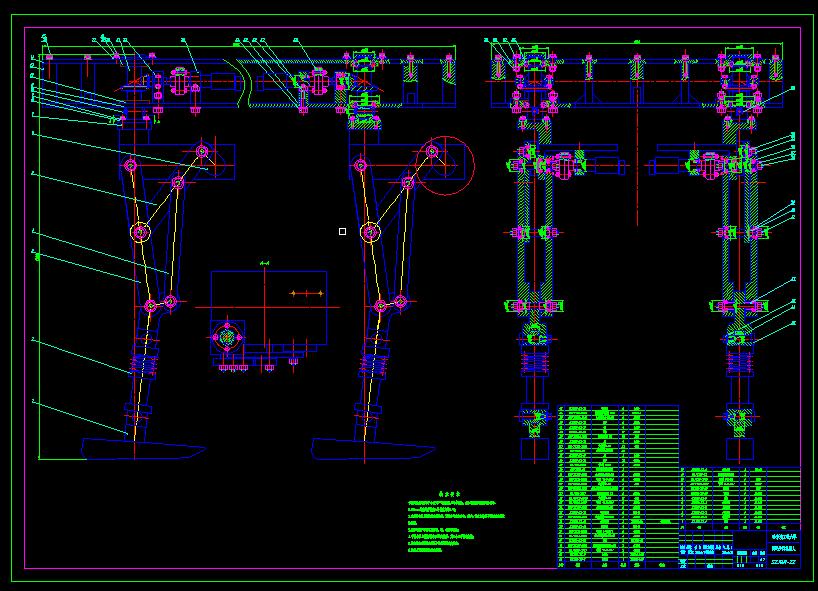
2、腿部结构

腿部结构是四足步行机器人的重要组成部分,直接影响机器人的运动性能,腿部结构设计需考虑运动范围、力学性能和结构稳定性等方面,常见的腿部结构有单关节腿、双关节腿等,其中双关节腿具有较大的运动灵活性。
3、关节结构
关节结构是连接机器人身体与腿部的重要部分,负责实现机器人的运动,关节结构的设计需考虑其灵活性、稳定性和耐用性,常见的关节类型包括旋转关节、弯曲关节等。
4、驱动与控制系统
驱动与控制系统是四足步行机器人的核心部分,负责实现机器人的运动控制,驱动系统为机器人提供动力,控制系统则负责实现机器人的运动规划、感知和决策。
四足步行机器人的设计原则
在四足步行机器人的结构设计过程中,需遵循以下设计原则:
1、功能性原则:机器人应满足使用需求,具备相应的运动、感知和作业能力。
2、稳定性原则:机器人应在各种环境下保持稳定,避免在运动过程中发生意外。
3、可靠性原则:机器人应在长时间使用过程中保持性能稳定,具有较高的可靠性。
4、优化原则:在满足使用需求的前提下,对机器人的结构、重量、能耗等进行优化,以提高其性能。
四足步行机器人的结构优化策略
为了提高四足步行机器人的性能,可采取以下优化策略:
1、轻量化设计:采用轻质材料,如铝合金、碳纤维等,以降低机器人的重量,提高其运动性能。
2、优化材料分布:通过有限元分析等方法,优化材料的分布,使机器人在承受载荷时具有更高的刚度,提高材料的利用率,对关键部位进行加强设计以提高其强度和耐久性,采用先进的制造工艺和技术来提高生产效率和降低成本,例如采用精密加工技术、自动化组装技术等,通过仿真软件对机器人的运动性能进行仿真分析,以便在实际生产中对其进行优化和改进,加强机器人的环境适应性设计,使其能够在复杂环境下稳定工作,例如增加防水防尘功能等,结合实际需求进行定制化的设计以提高机器人的适用性,例如针对特定应用场景进行结构优化等,综合考虑各种因素以实现最佳的设计方案提高机器人的整体性能和市场竞争力,五、结论四足步行机器人的结构设计是一项复杂而重要的任务涉及多个领域的知识和技术随着科技的进步和应用需求的增长四足步行机器人将在更多领域得到应用和发展,本文详细介绍了四足步行机器人的主要组成部分设计原则和优化策略以便为相关研究提供参考和借鉴,通过不断优化和改进四足步行机器人的性能将得到进一步提升为人类社会带来更多的便利和价值。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号