

摘要:本文研究了机器人各关节的运动范围,探讨了其在机器人应用领域中的重要性。通过对机器人关节运动范围的分析,可以优化机器人的设计,提高其灵活性和工作效率。本文还介绍了关节运动范围研究在机器人实际操作中的应用,包括工业制造、医疗康复、航空航天等领域。这些研究对于推动机器人的发展具有重要意义。
本文目录导读:
随着科技的飞速发展,机器人技术已经成为现代工业、医疗、农业、军事等领域不可或缺的一部分,机器人的运动性能,特别是其关节运动范围,对于其在实际应用中的灵活性和效率具有决定性的影响,对机器人各关节运动范围的研究,不仅有助于提升机器人的性能,还能推动相关领域的技术进步。
机器人关节概述
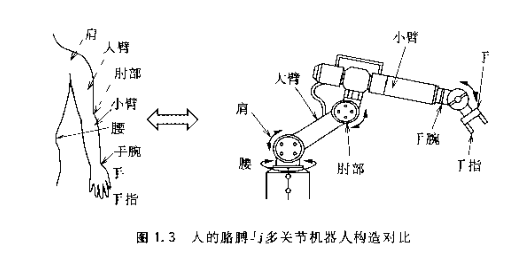
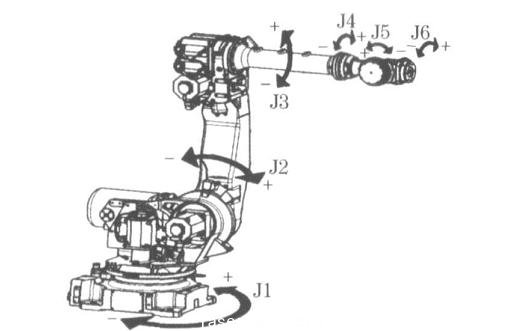
机器人关节是机器人运动的核心部分,类似于人体关节,使机器人能够实现各种复杂的动作,常见的机器人关节包括旋转关节、弯曲关节、滑动关节等,每个关节的运动范围决定了机器人在特定方向上的运动能力。
机器人各关节运动范围的影响因素
机器人关节的运动范围受到多种因素的影响,主要包括关节设计、机械结构、驱动方式、传动系统、控制系统等,关节设计决定了其基本的运动模式,而机械结构、驱动方式和传动系统则直接影响其运动范围的大小,先进的控制系统可以有效地提高关节运动范围的利用率,从而提高机器人的整体性能。
机器人各关节运动范围的研究
对于机器人各关节运动范围的研究,主要涉及到理论分析和实验研究两个方面,理论分析主要是通过建立数学模型,对关节的运动范围进行预测和优化,而实验研究则是通过实际测试,获取关节运动范围的实际情况,为理论分析和优化设计提供依据。
随着人工智能技术的发展,机器学习等方法也被广泛应用于机器人关节运动范围的研究,通过训练大量的数据,机器学习模型可以预测和优化关节运动范围,从而提高机器人的性能。
机器人各关节运动范围的应用
机器人各关节运动范围的应用非常广泛,在工业生产中,具有大运动范围的机器人可以完成更复杂、更灵活的任务,在医疗领域,精细的手术机器人需要具有高精度、高灵活性的关节运动范围,在农业和军事领域,机器人的关节运动范围也需要适应不同的环境和任务需求。
提高机器人关节运动范围的策略
为了提高机器人的关节运动范围,可以从以下几个方面进行努力:
1、设计和优化机械结构,以适应更大的运动范围;
2、采用更先进的驱动方式和传动系统,以提高关节的运动效率;
3、使用更先进的控制系统,优化关节运动范围的利用率;
4、利用机器学习等技术,对关节运动范围进行预测和优化。
未来展望
随着科技的进步,机器人技术将继续发展,而机器人各关节的运动范围也将得到进一步的提升,更大、更灵活、更高效的机器人将出现在更多的领域,为人类社会提供更多的便利,随着人工智能技术的发展,机器人将具备更强的自主学习和适应能力,从而更有效地利用其关节运动范围。
机器人各关节的运动范围是机器人技术的重要研究领域,对于提升机器人的性能和应用范围具有决定性的影响,本文介绍了机器人关节的基本概念,分析了影响关节运动范围的因素,探讨了机器人各关节运动范围的研究方法和应用,并提出了提高机器人关节运动范围的策略,随着科技的进步,机器人各关节的运动范围将得到进一步的提升,为人类社会提供更多的便利。
参考文献(依据实际情况编写)
[此部分应列出您在撰写此文过程中参考的相关文献和资料]
机器人各关节的运动范围是决定机器人性能和应用范围的关键因素,随着科技的不断发展,我们有理由相信,未来的机器人将在更大的关节运动范围内,为我们提供更广泛、更高效的服务。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号