

机器人转向听指挥教学反思:本次教学过程中,我尝试引导学生通过实践操作掌握机器人的转向技能。通过实际操作和调试,学生们逐渐掌握了机器人转向的基本原理和操作技巧。我也注重培养学生的团队协作能力和解决问题的能力。在教学过程中,我不断反思自己的教学方法和策略,及时调整和改进,以确保学生能够更好地掌握相关知识和技能。总体而言,本次教学取得了一定的效果,但仍需进一步改进和完善。
本文目录导读:
随着科技的飞速发展,机器人技术日益成熟,其在各个领域的应用也越来越广泛,在教育领域,机器人教学已经成为培养学生实践能力和创新意识的重要手段,本文将围绕机器人转向听指挥这一主题展开教学反思,旨在总结教学经验,找出存在的问题,并提出改进措施。
在本次教学过程中,我主要围绕机器人的转向和听指挥功能展开,通过理论讲解、实践操作和案例分析等方法,使学生了解机器人的转向机构和传感器的工作原理,掌握编程实现机器人转向和听指挥的基本技能。
具体教学内容包括:
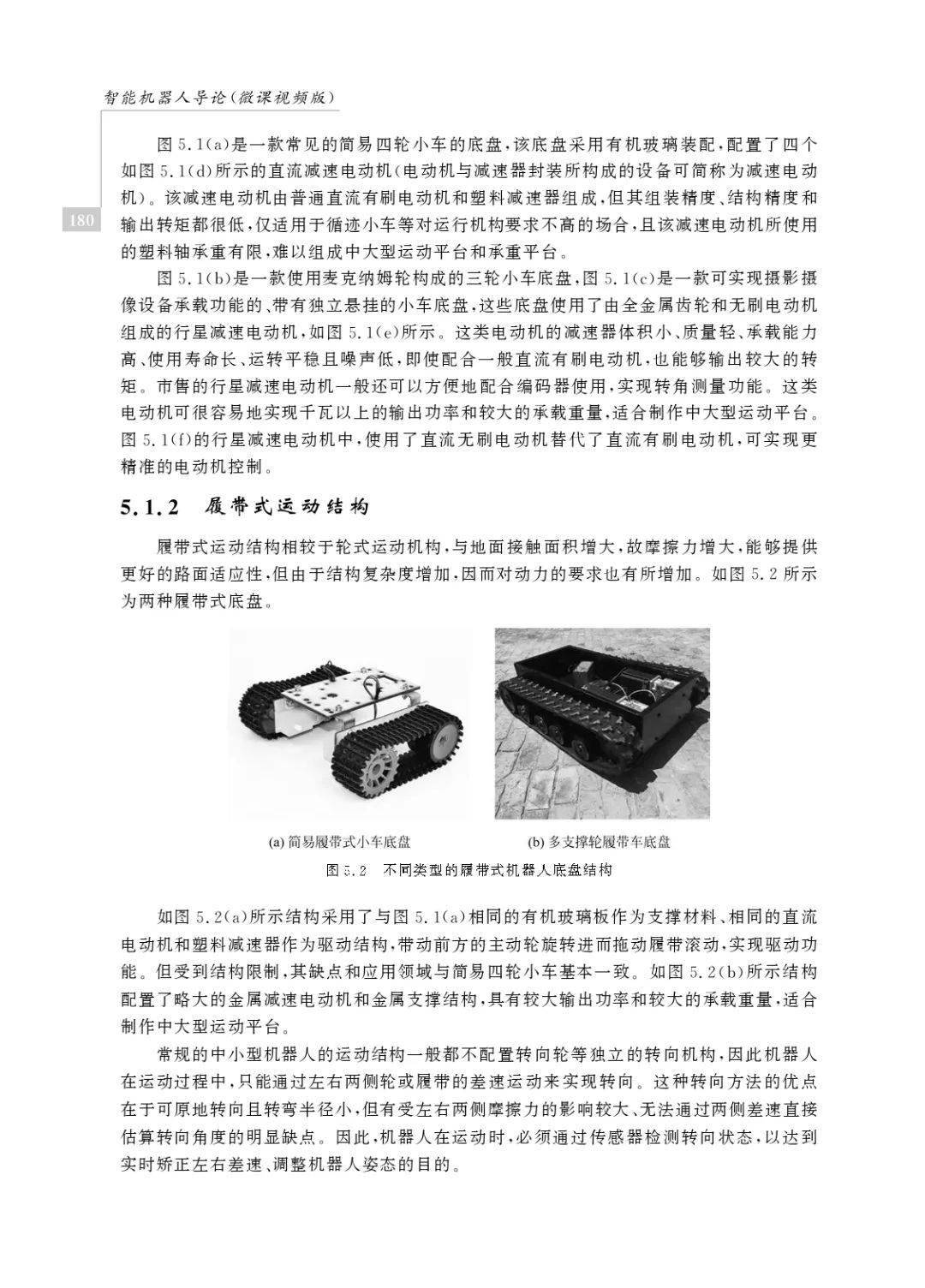
1、机器人转向机构的基本原理和构造;
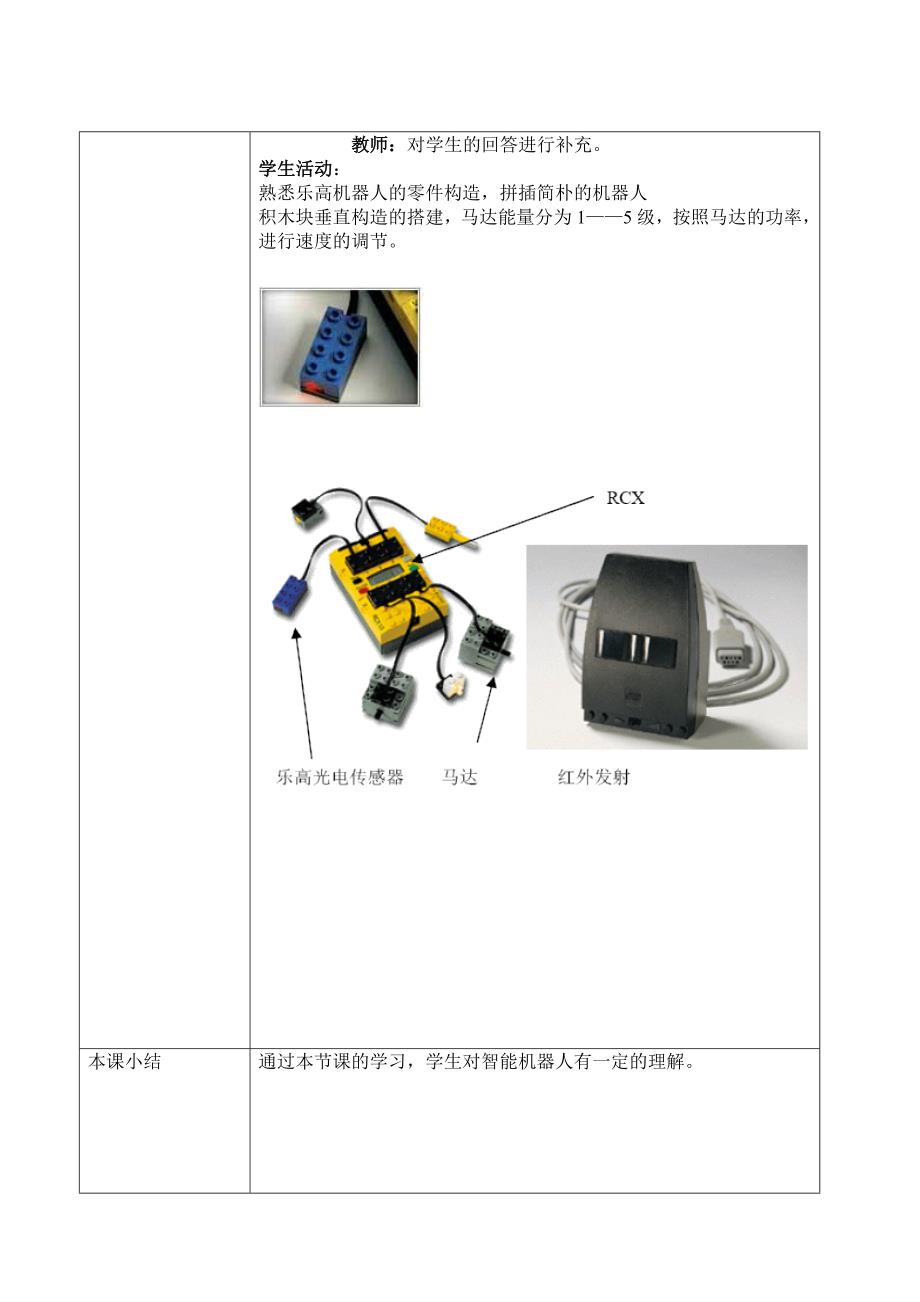
2、传感器的工作原理及其在机器人中的应用;
3、编程实现机器人的转向和听指挥功能。
在教学过程中,我注重理论与实践相结合,引导学生通过实际操作来加深对理论知识的理解,我还鼓励学生进行小组讨论和合作学习,共同解决问题,培养他们的团队协作能力和创新意识。
教学效果与反思
1、教学效果
通过本次教学,学生基本掌握了机器人的转向和听指挥功能的基本原理和实现方法,他们能够独立完成简单的编程任务,实现机器人的基本动作,学生在团队协作和问题解决方面也表现出了一定的能力。
2、存在问题
(1)部分学生在理论学习时感到枯燥无味,缺乏兴趣;
(2)实践操作环节的时间较短,部分学生无法充分理解和掌握机器人的操作技巧;
(3)部分学生在编程时遇到了一些困难,无法独立完成任务;
(4)学生对机器人应用领域的了解不够深入,缺乏实际应用的能力。
3、改进措施
(1)丰富教学方法和手段,激发学生的学习兴趣;
(2)增加实践操作的时间,让学生充分理解和掌握机器人的操作技巧;
(3)加强编程教学的力度,提高学生的编程能力;
(4)引导学生关注机器人应用领域的发展,增加实际应用的机会。
机器人转向听指挥教学的改进策略
1、加强跨学科融合教学
机器人教学不应仅仅局限于技术和编程方面的知识,还应涉及物理、数学、工程等学科,通过跨学科融合教学,可以帮助学生更好地理解机器人的原理和运行机制,提高学生的学习兴趣和综合能力。
2、强化实践操作能力
机器人教学应注重实践操作能力的培养,在教学过程中,应增加实践操作环节的时间,让学生亲手操作机器人,实践编程和调试技能,还应鼓励学生参加机器人竞赛和实践活动,提高实际操作能力和创新意识。
3、引入仿真软件辅助教学
仿真软件可以模拟机器人的运行环境和动作,帮助学生更好地理解机器人的运行机制,通过仿真软件,学生可以在计算机上完成机器人的编程和调试,提高教学效率和质量。
4、关注机器人应用领域的发展
在教学过程中,应引导学生关注机器人应用领域的发展,让学生了解机器人的实际应用和前景,还应增加实际应用的机会,让学生将所学知识应用到实际项目中,提高实际应用能力。
本次机器人转向听指挥教学反思总结了教学过程中的经验和问题,并提出了改进措施和教学改进策略,通过加强跨学科融合教学、强化实践操作能力、引入仿真软件辅助教学以及关注机器人应用领域的发展等措施,可以进一步提高机器人教学的质量和效果,培养学生的实践能力和创新意识。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号