

摘要:本文研究了四足机器人的行走原理编程梯形图。通过对四足机器人结构特点和运动规律的分析,结合梯形图编程方法,实现了机器人的稳定行走。研究内容包括机器人步态规划、关节运动控制以及行走过程中的稳定性分析。本研究为四足机器人的运动控制提供了理论支持,有助于推动四足机器人在实际场景中的应用。
本文目录导读:
随着科技的飞速发展,四足机器人作为模拟生物运动的重要载体,已经在许多领域得到了广泛的应用,从地形适应性到救援搜救,从科研探索到娱乐体验,四足机器人的行走能力是其核心功能之一,本文将深入探讨四足机器人的行走原理,并着重解析其基于梯形图的编程方法。
四足机器人行走原理
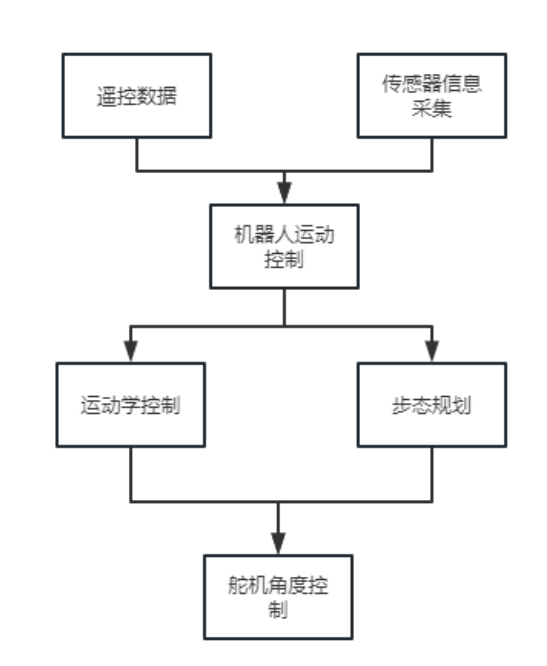
四足机器人的行走原理主要涉及到机械结构、电子控制和算法处理等方面,在机械结构上,四足机器人通常采用仿生设计,以模拟生物(如猫、狗等)的行走步态,电子控制部分则负责接收指令并驱动电机运动,从而实现机器人的行走动作,算法处理部分则是通过复杂的算法计算,使得机器人能够在各种环境下稳定行走。
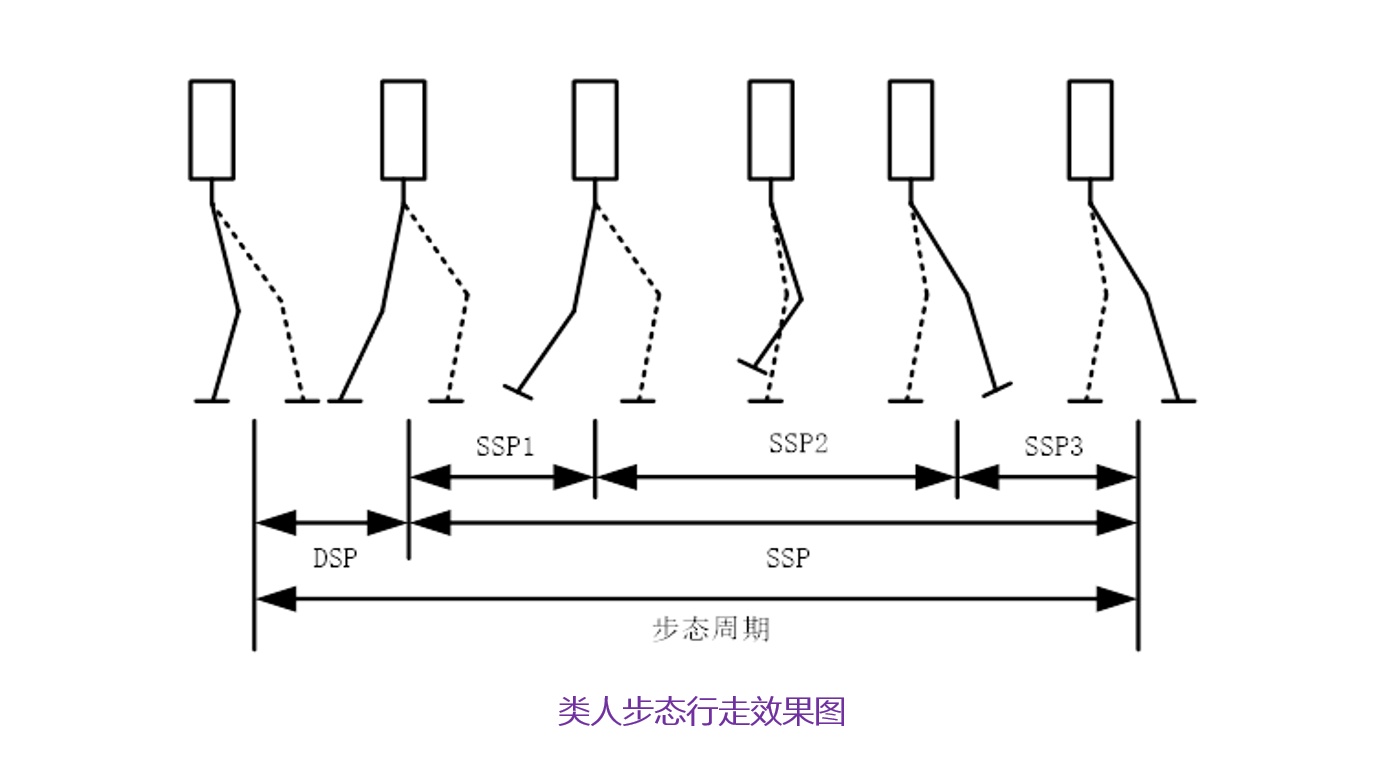
四足机器人的行走过程可以分为三个阶段:支撑阶段、摆动阶段和腾空阶段,在支撑阶段,机器人的腿部结构支撑身体重量,并为下一步的移动提供力量;在摆动阶段,腿部开始向前或向后摆动,为下一步的移动做准备;在腾空阶段,机器人完成腿部摆动并完成位置调整,这三个阶段的循环进行,构成了四足机器人的基本行走步态。
基于梯形图的编程方法
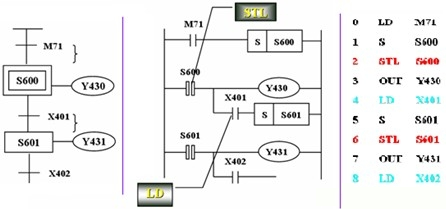
梯形图是一种直观的编程方式,广泛应用于工业控制和机器人编程中,在四足机器人的编程中,梯形图也发挥着重要的作用,通过梯形图,我们可以方便地描述机器人的行走步态和动作序列。
在基于梯形图的四足机器人编程中,首先需要根据机器人的行走原理和设计需求,设计出合适的步态,通过梯形图的方式,将步态分解为一系列的动作序列,每一个动作序列对应着机器人行走的一个阶段,在梯形图中,我们可以清晰地看到每个阶段的起始和结束,以及每个阶段的动作细节。
通过梯形图,我们还可以方便地实现机器人的运动控制,我们可以通过调整梯形图中各个阶段的持续时间、速度和加速度等参数,来控制机器人的行走速度和方向,我们还可以根据环境变化和任务需求,灵活地调整梯形图的结构和参数,以实现机器人的动态行走和自适应能力。
实例分析
以一个简单的四足机器人为例,假设其需要在平坦地面上进行行走,我们需要设计出一个基本的步态,包括支撑阶段、摆动阶段和腾空阶段,通过梯形图的方式,将这个步态分解为一系列的动作序列,每一个动作序列对应着机器人的一条腿部的运动过程,在梯形图中,我们可以清晰地看到每条腿部的起始和结束位置,以及其在各个阶段的动作细节,我们就可以根据这个梯形图,编写机器人的控制程序,实现其行走功能。
四足机器人的行走原理编程梯形图是其核心技术之一,通过深入研究四足机器人的行走原理,并结合梯形图的编程方法,我们可以方便地实现机器人的稳定行走和动态调整,随着科技的进步和算法的优化,四足机器人的应用前景将更加广阔,希望通过本文的探讨,能为四足机器人的研究和应用提供一些有益的参考。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号